Hi there,
I have used CE on my X96 MP 4+64 (dtb sm1_s905x3_4g_1gbit currently on Matrix 19.3) for more than 2 years now, used it as an NAS+docker host, 7x24 hours non-stopping, surprisingly stable! Thanks for your amazing coding and development!
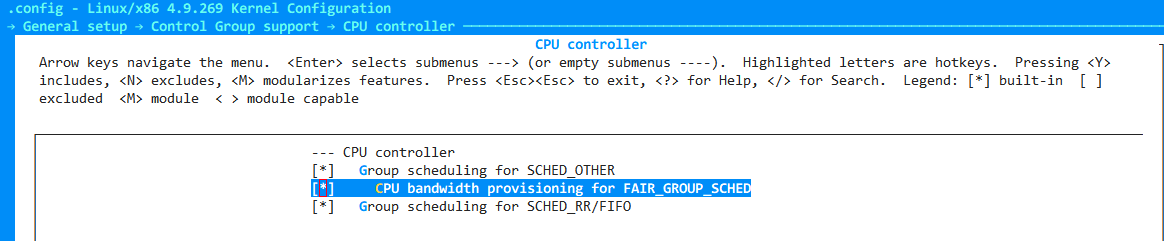
Since I run the box as docker host, one issue arises recently, that I noticed the default kernel cgroup does not support CPUQuota, aka in Linux kernel it has:
# CONFIG_CFS_BANDWIDTH is not set
So I cannot use proper slice in systemd to limit some “bad-behaved” docker programs from occupying 100% CPU and causing system unstable. Now I use CPUset to limit the container on 2 cores, but of course this is not economy as it bumps CPU frequency to max with only 2 cores running.
I’m not quite a programmer myself but I found in Libreelec the source has this one default to y:
source in LibreELEC
But I do not want to change to Libreelec, so I believe the only solution is to compile one myself?
I checked some articles on the forum, downloaded the source code, installed all dependencies (debian 10 x64 on VMware, I built openwrt on this machine several times):
sudo apt install texinfo xfonts-utils default-jdk gcc make git unzip wget xz-utils bc gperf zip unzip g++
Tried stable 19.3 branch, but can never download some dependencies, googled for a while and seems it’s a repo relocation and corrected in late Dec, so I have no choice but switching to .20 and compiled using:
PROJECT=Amlogic-ce DEVICE=Amlogic-ng ARCH=arm tools/download-tool
Everything downloaded this time with master 20 branch, then I updated kernel config in
/projects/Amlogic-ce/devices/Amlogic-ng/linux/linux.aarch64.conf
Then started compile with:
PROJECT=Amlogic-ce DEVICE=Amlogic-ng ARCH=arm make image
But stuck at errors below:
FAILURE: scripts/install u-boot-LePotato:target has failed!
So I think this uboot is not for my model, then I go ahead and comment it out in /mnt/Lienol/Coreelec/projects/Amlogic-ce/devices/Amlogic-ng as:
# SUBDEVICES="Odroid_N2 Odroid_C4 Odroid_HC4 LePotato LaFrite Radxa_Zero"
But later another error prompted out:
<<< avahi:target seq 203 <<<
BUILD avahi (target)
TOOLCHAIN configure
/mnt/Lienol/Coreelec/packages/network/avahi/package.mk: line 59: ./autogen.sh: No such file or directory
FAILURE: scripts/build avahi:target during pre_configure_target (package.mk)
*********** FAILED COMMAND ***********
NOCONFIGURE=1 ./autogen.sh
**************************************
*********** FAILED COMMAND ***********
${SCRIPTS}/build "${1}" "${PARENT_PKG}"
**************************************
FAILURE: scripts/install avahi:target has failed!
The following log for this failure is available:
/mnt/Lienol/Coreelec/build.CoreELEC-Amlogic-ng.arm-20/.threads/logs/203.log
>>> avahi:target seq 203 >>>
[200/338] [FAIL] install avahi:target
The following log for this failure is available:
/mnt/Lienol/Coreelec/build.CoreELEC-Amlogic-ng.arm-20/.threads/logs/203.log
Tried several times with same result. Logs attached:
203.log (565 Bytes)
Can you tell me what to do? I just want a build with that kernel option enabled. Thank you in advance.